Powered exoskeletons have demonstrated great potential for ambulation restoration of people with gait impairments (e.g. stroke survivors and children with cerebral palsy) and walking augmentation of healthy individuals (e.g. load carriers and walkers). However, state of the art portable powered exoskeletons is not only excessively heavy and bulky, but also typically obtrusive and unresponsive imposing both discomfort hazard and fall risk. One of the key challenges to bridge those gaps lie in the actuation system that is desired be low profile, lightweight, high assistance torque, backdrivability, and high control bandwidth.
As wearable devices, exoskeletons should minimize its mass and impose no restriction on human movements. Therefore, backdrivability of a wearable robot (as measured by the impedance between an exoskeleton and its wearer) is crucial to minimize the resistance of a device to its user during physical human-machine interaction. Moreover, high control bandwidth of wearable robots is critical for human safety as most exoskeletons are designed for assistance during walking (relatively slow movement at 1-2 Hz frequency) incapable of handling unexpected movements (e.g. human tripping). High backdrivability and high control bandwidth are key features of high performance wearable robots. From the design perspective, the mechanical system of powered exoskeletons is comprised of motors, transmission mechanism, and wearable structures. Motors and transmission mechanism predominantly determine backdrivability and control bandwidth of an exoskeleton.
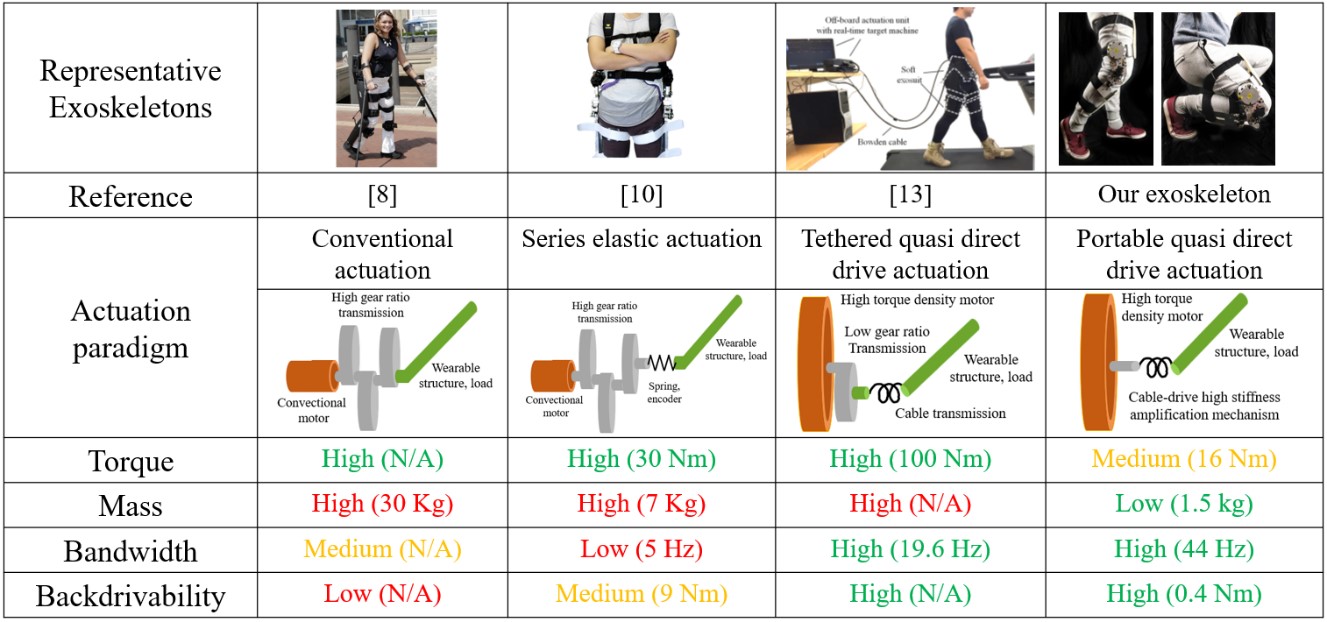
There is three actuation paradigm of wearable robots, namely, conventional actuation, series elastic actuator (SEA) and quasi-direct drive actuation (also known as proprioceptive actuation). Fig. 1 illustrates torque output, device mass, backdrivability, and bandwidth of several representative exoskeletons in terms of actuation paradigm. Conventional actuation uses high-speed and low-torque motors (typically brushless direct current (DC) motors) with large ratio gearhead. It can well satisfy the required assistive torque and control bandwidth but suffers from low torque density and high mechanical impedance (low backdrivability) in unpowered mode. Although torque control algorithms might ameliorate the undesired mechanical impedance, it is generally infeasible to minimize the low backdrivability side effect of this actuation paradigm due to high inertia of the actuator between human and the robot and uncertainty of human movement. In particular, exoskeletons using this actuation paradigm may impose a safety hazard as it impedes human during abrupt human movements. Series elastic actuators (including parallel elastic actuators and other variable stiffness elastic actuators) overcomes the backdrivability limitation [9, 10] as it improves compliance of human-machine interaction using elastic elements (a passive mechanical spring). However, series elastic actuators sacrifice control bandwidth, increase system complexity, and incur extra mass and volume limiting its benefits for wearable robots that aim to avoid those drawbacks. Quasi direct-drive actuation consisting of high torque motors and low gear ratio transmission mechanism represents an improved solution to optimize both backdrivability and control bandwidth. Designed tethered exoskeletons following this paradigm and proved its performance. Tethered exoskeletons due to excessive mass and fixed actuation base are constrained in lab settings and incapable of assistance in real-world settings (e.g. community-based ambulation assistance).
High torque density actuation test
Leave a Comment